Rozwiązanie APA
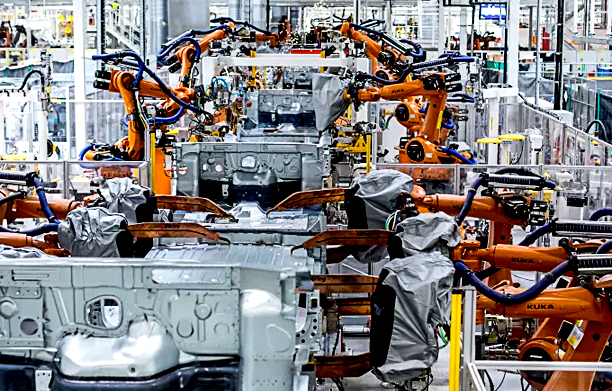
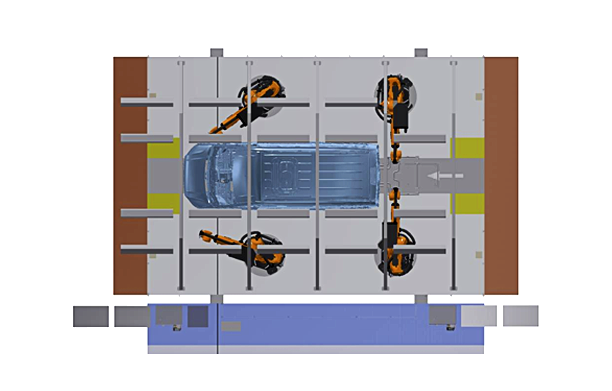
Klient otrzymał rozwiązanie spełniające wszystkie założenia określone w zapytaniu ofertowym. Na linii zamontowano cztery roboty wraz z systemem automatycznego podawania materiału uszczelniającego.
Opis główny
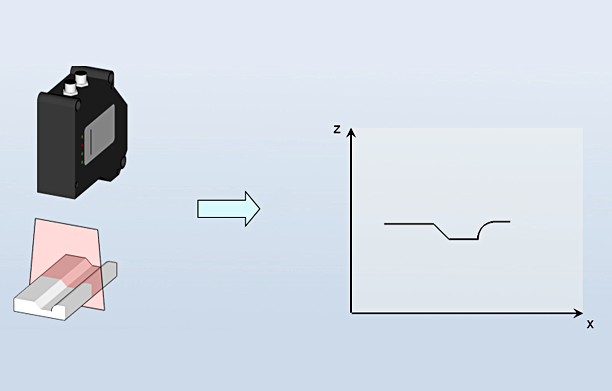
Informacja o typie karoserii, będącej na stacji zrobotyzowanej pobierana jest ze stacji czytającej RFID. Typ ten przesyłany jest do systemu sterującego PLC, który zarządza pracą stacji zrobotyzowanej. Gdy karoseria osiągnie pozycję bazową i wiemy jaki typ karoserii aktualnie znajduje się na stacji, następuje pomiar samochodu systemem 3D. Kamery 3D zwracają korekcję XYZ, ułożenia karoserii na przenośniku rolkowym. Przesunięcia XYZ względem wzorca, są następnie przesyłane do robotów. W pierwszej kolejności roboty wykonują pracę skanowania szczeliny zgodnie z przesunięciem karoserii XYZ. Skanowanie oraz korekty szczelin, zwracane są do systemu VMT za pomocą czujników BK LR300. Poniżej wynik skanowania taki czujnikiem.
Po zakończonym skanowaniu, roboty rozpoczynają pracę nakładania materiału uszczelniającego. Ilość wstrzykiwanego uszczelniacza jest uzależniona od szerokości szczeliny. Szerokość szczeliny jest zwracana do robota poprzez system VMT.
Benefity
- Automatyzacja procesu ręcznego,
- Zmniejszenie zużycia materiału uszczelniającego,
- Możliwość szybkiego zwiększenia wolumenu produkcyjnego.
Zastosowane technologie
- Sterownik PLC 319F-3PN/DP,
- Roboty KUKA KR210 R3100,
- Systemy podawania materiału firmy Graco,
- Systemy wizyjne Pepperl Fuchs ( VMT ),
- Skanery SICK.