
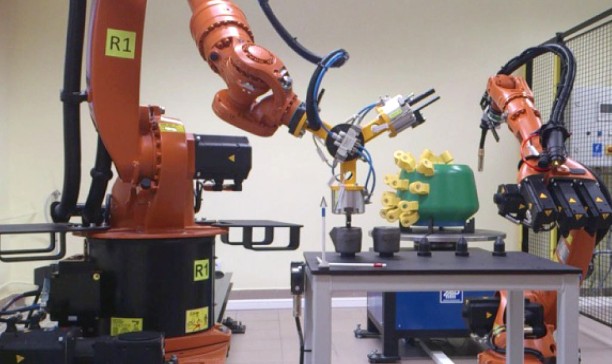
Jeden robot KUKA 7-dmio osiowy (KR 16) zamontowany ma podwójny chwytak pneumatyczny SMC i pobiera elementy (części organu roboczego kombajnu chodnikowego) ze stolika i przykłada do głowicy skrawającej organu skrawającego. Na drugim robocie KUKA KR 6 arc zamontowany jest palnik systemu spawającego firmy FRONIUS wraz z modułem antykolizyjnym.
Robot wykonuje symulację spawania elementu przyłożonego do głowicy przez robota KR 16. Nad całością czuwa sterownik SIEMENS S7-1200 zamontowany w dodatkowej szafie sterowniczej z panelem monochromatycznym HMI 5,7”.
Koncepcja
- Projekt 3D i 2D całej celi zrobotyzowanej
- Montaż robotów KUKA
- Montaż ogrodzenia AXELENT
- Montaż stołu roboczego
- Montaż i podłączenie chwytaków pneumatycznych
- Montaż i podłączenie zespołu spawającego FRONIUS i modułu antykolizyjnego
- Wykonanie instalacji pneumatycznej wraz z uruchomieniem kompresora
- Prefabrykacja szafy sterowniczej
- Programowanie sterownika PLC
- Programowanie dwóch robotów KUKA KRC4 KR6 arc, KR16
- Stworzenie wizualizacji
- Implementacja programów
Komponenty projektu
- Jednostka centralna Siemens S7-1214C
- Panel operatorski Simatic HMI Panel KTP600PN 5.7’MONO
- Roboty KUKA KRC4 KR6 arc, KR16
- Pneumatyka SMC (siłowniki, elektrozawory)
- Zespół spawający FRONIUS
- Ogrodzenie (AXELENT X-GUARD) wraz z zamkiem bezpieczeństwa EUCHNER
- Kompresor STANLEY
- Falowniki MOVITRAC firmy SEW