

APA solution
Replacement of the old reloading system based on pneumatic systems, which did not allow to speed up the loading process, with a modern, fast and universal solution for different car models.
APA had to approach this project by comprehensively analysing multiple problems associated with the construction of such a large robot station in the production space limited by already existing machines and fences. KUKA Tytan robots selected at the offline simulation stage, due to their large dimensions, heavily load the floor. Hence the need to strengthen the floor on which the robots were placed mounted on the pedestals. Other mechanical and construction works focused on dismantling the old control system and installing new components.
The electric and software works consisted in transferring the control to a new group of controllers. In the new solution the Siemens CPU 416F-3 PN/DP controller was used, thanks to which the whole safety system and its logic was based on a PLC controller. The project also used Siemens HMI panel TP1900, creating a very clear visualization for operators.
APA roboticists enabled the control of KUKA Tytan robots based on RoboTeam software package, which ensures synchronous work between 4 robots. One robot acts as Master and the remaining three robots work as Slaves. KUKA Titans are real giants in the world of industrial robots. These unusual devices are designed for lifting and precise handling of even the heaviest loads and they work in places where man and traditional industrial robots cannot.
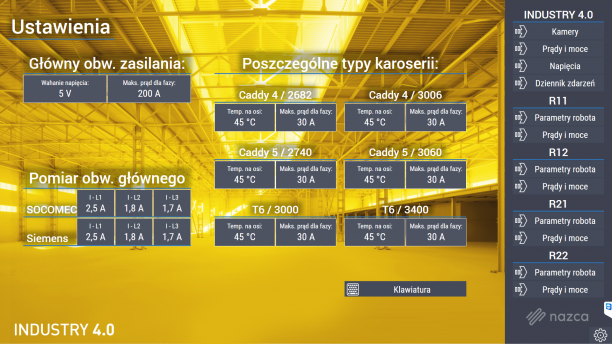
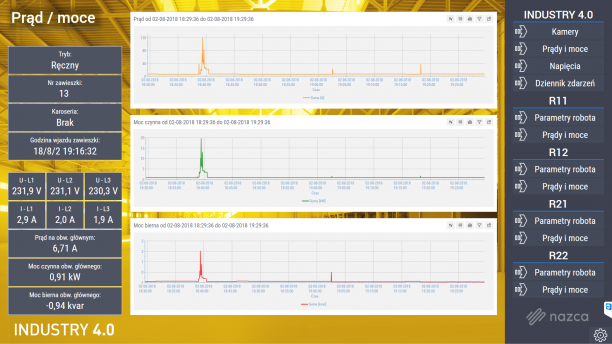
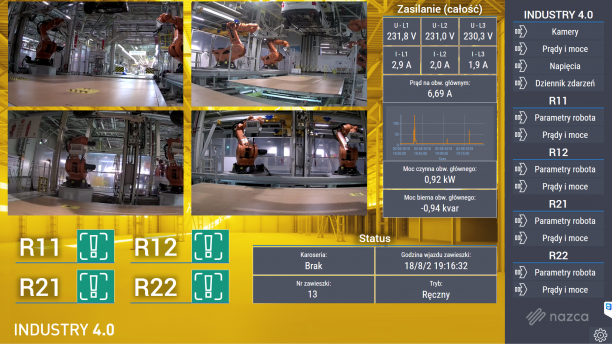
In this project, a team of 4 robots not only works together on a common task, but is also integrated into the intelligent analysis platform called Nazca. The platform monitors each robot separately, but also together as a station to give a holistic view of the entire technical support team. For each of the 6 axes, the temperature of each axis is monitored in degrees Celsius, and speed and power consumption are monitored in percentage values. In addition, the attached network analysers record the current consumption for each phase of the robot's power supply (12 phases in total), as well as active/reactive power and voltages.
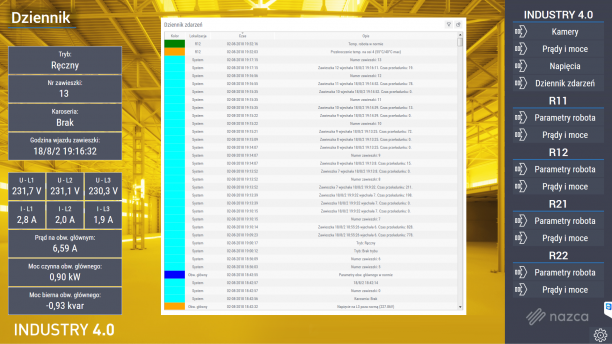
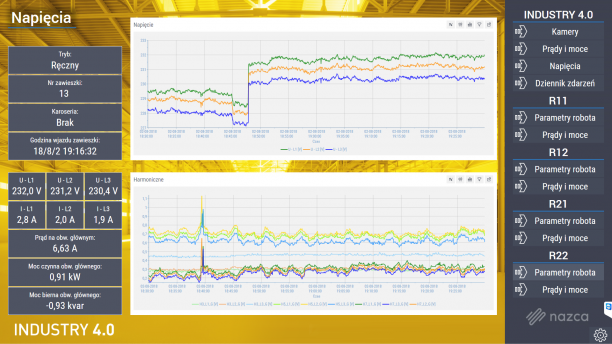
Furthermore, we analyze voltages for all 3 phases, current harmonics and total currents for the whole installation. This is to observe whether the robots are operating under optimal conditions. Nazca not only collects the information, but also visualizes the data on graphs to enablecomparison and analysis. Data can also be exported to csv files or stored in the platform archive. Apart from monitoring and archiving the events, Nazca has the ability to inform the userabout anomalies. An example is the maximum temperature thresholds set in a given time. If the temperature exceeds the maximum, the system will show a notification. The same happens when currents and voltages are overrun.
What is more, the whole unloading station provides information about the mode in which the station operates (manual, automatic, service). Information on the type of body and the number of the carrier that brought the body is also recorded. Additionally, the unloading time is measured for statistics. The whole station area is monitored by 4 cameras.
Benefits
APA provided a comprehensive service by building the station in place of the old one and creating a solution to improve the cycle time of the station, giving the possibility to produce more car models while ensuring maximum safety of the robot station during production.
Fun fact
This project is the best example of Industry 4.0 concept, as it uses new production methods together with production and information management.











