
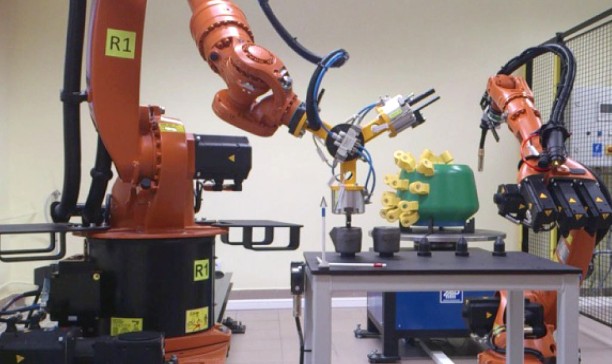
One 7-axis KUKA (KR 16) robot is provided with a double pneumatic SMC gripper and it picks elements (elements of the working part of a pavement combined machine) from a table and applies them to the cutting head of the cutting element. The second KUKA KR 6 arc robot is provided with a burner of a welding system made by FRONIUS, including an anti-collision module.
The robot simulates welding of an element applied to the head by the KR 16 robot. The entire process is supervised by a SIEMENS S7-1200 controller installed in an additional control cabinet, equipped with a monochromatic HMI 5.7” panel.
Concept
- 3D and 2D design of the entire robotic cell
- KUKA robot installation
- AXELENT fencing installation
- Working table installation
- Pneumatic gripper installation and connection
- FRONIUS welding unit and anti-collision module installation and connection
- Execution of the pneumatic installation, including compressor startup
- Control cabinet pre-fabrication
- PLC controller programming
- Programming of two KUKA robots KRC4 KR6 arc, KR16
- Visualization creation
- Program implementation
Project components
- Siemens S7-1214C central unit
- Simatic HMI Panel KTP600PN 5.7’MONO operator panel
- KUKA KRC4 KR6 arc, KR16 robots
- SMC pneumatics (actuators, electrovalves)
- FRONIUS welding unit
- Fencing (AXELENT X-GUARD) with an EUCHNER safety lock
- STANLEY compressor
- SEW MOVITRAC inventers











